
Research
My research interests lie in the areas of Artificial Intelligence, Robotics, Machine Learning, Deep Learning, and Cyber-Physical Systems. My research balances both theory and practical implementations, with an emphasis on developing elegant, scalable, theoretically sound algorithms for solving real-world robotics applications. Here are the main themes in my lab's research:
Planning under Uncertainties for Safety-critical Systems

Vision-based Perception Systems for Autonomous Cars

Efficient Tasking and Coordination for Multi-Agent Systems
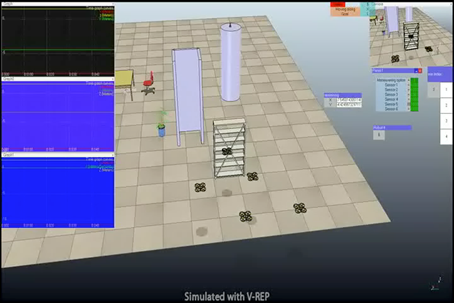
Environmental Monitoring using Unmanned Systems
My doctoral research was focused on developing unmanned autonomous robotic systems that can contribute greatly to search-and-rescue missions,
and can also be used for environmental monitoring purposes.
My doctoral dissertation was a study of UAV-based Topographic Mapping and Source Localization of the Radiation Field.
This dissertation seeks to address methodological shortcomings in the current empirical research on source localization of the radiation field.
In the radiation field monitoring problem, measurements of the field are spatially distributed throughout the target area.
Given a target area, estimating the source positions is what is commonly known as a source localization problem.
One of the straightforward approaches is to find the location where the measurement is significantly higher than the others.
However, in the radiation field, if the cumulative radiating effect of sources exists, the field turns out to be complex to estimate,
and the sources are no longer at the center of each distribution. Accordingly, the hotspot, where the radiation intensity is maximum,
does not coincide with the positions of sources. From the robot's point of view, the measurement is one pixel and must gather at the expense of exploration.
When the environment is unknown, the robot needs to measure the field by exploring which location is interesting and which is not.
Robots operating under such conditions have to tackle the problem of deciding where to go to get the most relevant information.
Therefore, we propose an efficient exploration method to quickly localize the radiation sources using the following procedures:
1) Region of Interest (ROI) determination utilizing topographic maps with specific radiation level selection methods and
2) source localization estimating the number of sources and their positions with Variational Bayes inference of Gaussian mixtures
For real-world implementation, we developed autonomous vision-based UAV navigation for a GPS-denied environment.
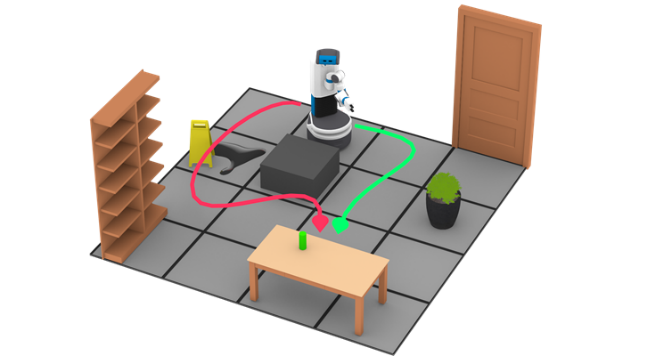
Planning under Uncertainties for Safety-critical Systems
In classical behavior planning algorithms assume that all the elements of an environment are known to compute the solution
before ever actually executing an action in the environment. Unfortunately, uncertainty is an unavoidable part of any autonomous system that precludes agents
from being able to plan a solution in advance.
To deal with uncertainties, part of my research activities aimed at leveraging
interactive learning and data-driven prediction to synthesize optimal policies with cost and energy constraints in
dynamic environments. Autonomous robots operating in uncertain domains often
face tasks with both Boolean qualitative requirements (such as reaching a goal location safely) and optimality criteria (such as reaching
the goal as fast as possible). These problems can be modeled as Partially Observable Markov Decision Processes (POMDPs) with quantitative
and qualitative objectives.
In this work, we study this problem for the special case
of safe-reachability objectives, which require that with a
probability above a threshold, a goal state is eventually reached
while keeping the probability of visiting unsafe states below a
different threshold. We present an online scalable policy synthesis framework for POMDPs with safe-reachability objectives.
We also offer a theoretical analysis of this framework and evaluate our framework through real-robot experiments.
Vision-based Perception Systems for Autonomous Cars
The advent of autonomous driving technologies would lead to vehicles with different levels of autonomy equipped with
Advanced Driver Assistance Systems (ADAS), in which automatically identifying pedestrians will be a crucial safety requirement.
An important extension of my research is to develop an efficient and robust deep learning-based perception system that facilitates
the vision-based planning modules. In particular, my research focuses on real-time accurate
pedestrian detection and tracking to ensure safety and reliability in autonomous driving.
Pedestrian detection is a notoriously hard problem and particularly challenging due to the fact that pedestrians may appear in various poses,
clothing, and articulations of body parts. Likewise, pedestrians can be found mostly in urban areas where the background texture form a highly cluttered environment.
We investigate multi-modal sensor data, joint evaluation of inferences from anchor box and semantic segmentation networks, and body parts to detect and
track pedestrians accurately and robustly.
In addition to the pedestrian detection problem, I also worked on modeling driving behavior using deep
learning algorithms when I was a Post-Doctoral Researcher at Nagoya University. My specific interest was in the Generative Adversarial Networks (GANs)
which is a semi-supervised machine learning algorithm. Specifically, I was focusing on developing the ability of self-driving or autonomous cars to detect
anomalous driving behavior with generative adversarial networks (GANs)
Efficient Tasking and Coordination for Multi-Agent Systems
In many scenarios, it is important to deploy a team of mobile robots as a sensing platform to accomplish complex missions such as smart farming, environmental monitoring,
etc.
Monitoring, surveying, or search-and-rescuing using the multi-robot system, however, can be a technical challenge because this problem demands an efficient tasking
and coordination mechanism. My research activities in multi-agent systems focus on developing an integrated task and coordination mechanism to monitor an area of
interest while incorporating the physical and sensing constraints of heterogeneous robots as well as satisfying measurement quality requirements.
My current research at NCAT primarily focuses on Multi-agent System applications and enabling capabilities.
In particular, we are interested in monitoring environmental phenomena, such as nuclear radiation, greenhouse gas emission, soil parameters in precision agriculture,
traffic incidents. These phenomena are generally referred to as spatiotemporal fields which have high variability in both time and space. Unlike a single robot system,
a multi-robot system presents an efficient, faster solution to the problem of understanding unknown spatiotemporal fields.
Besides surveillance and monitoring, we also investigate safety and reachability requirements in dynamic adversarial environments when little or no information about
the dynamics and intentions of the adversarial objects is available.